







Important Note:
No Reverse Polarity Protection at Vmotor, please double-check the polarity before powering up.
Introduction
MD10C is a newer version which is designed to drive high current brushed DC motor up to 13Amps continuously. It offers several enhancements such as support for both locked-antiphase and sign-magnitude PWM signal as well as using full solid-state components that result in faster response time and eliminate the wear and tear of the mechanical relay. And with Cytron's motor driver special feature: the on-board manual/test buttons, MD10C is super easy to get started.
Features
- Bi-directional control for one Brushed DC motor (Single Channel).
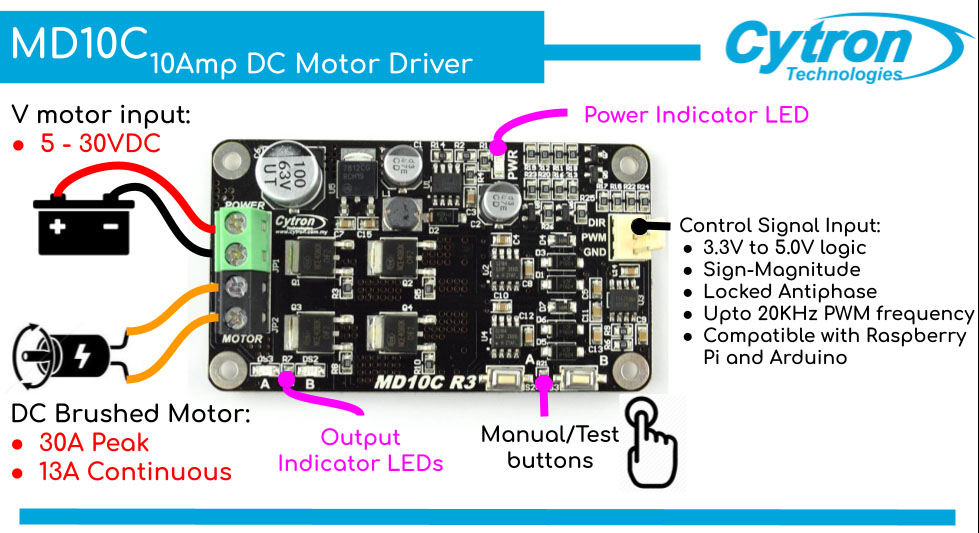
- Support motor voltage ranges from 5V to 30VDC.
- Regenerative Braking.
- Maximum current up to 13A continuous and 30A peak (10 seconds).
- 3.3V and 5V logic level input, compatible with Arduino and Raspberry Pi.
- Solid-state components provide faster response time and eliminate the wear and tear of mechanical relays.
- Fully NMOS H-Bridge for better efficiency and no heat sink is required.
- Speed control PWM frequency up to 20KHz (output frequency is same as input frequency).
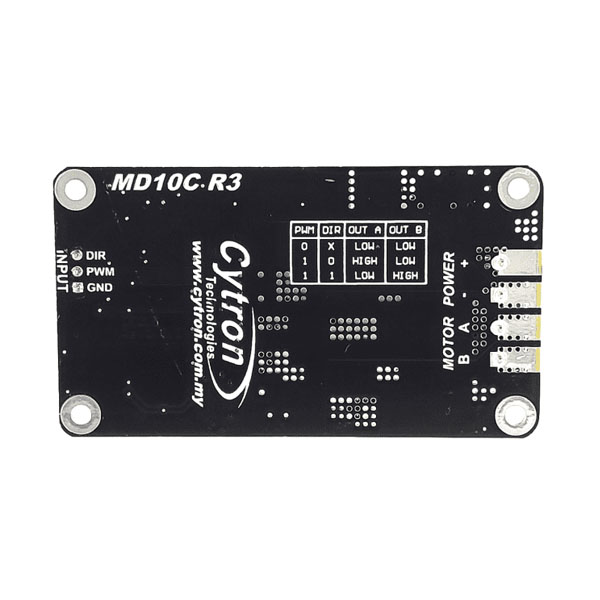
- Support both Locked-Antiphase and Sign-Magnitude PWM operation. **Note that it is not "RC PWM"
- The new MD10C can be powered from a single power source and NO additional Vin is required.
- Dimension: 75mm x 43mm
Download
- MD10C Rev3.0 User's Manual
- Arduino Library and Example (Github)
- MD10C FCC Certification
- MD10C RoHS Certification
- MD10C CE Certification
- Fritzing file
- MD10C Step files
Tutorials:
- MD10C Fast Testing
- PSC28A – Controlling MD10C and MDS40A
- SK40C PIC16F887 project 10 - Driving one DC brush motor with MD10C
- SK40C PIC16F887 project 16 - Driving two DC brush motor with MD10C by using SKPS
- Controlling MD10C with Arduino, Signed-Magnitude and Locked Anti-phase method
- Measuring DC Motor RPM Through Built-in Hall Sensor Encoder
- End Effector and Control Logic for Robot - Alessandro Minini, Hackster.io
Your Dynamic Snippet will be displayed here...
This message is displayed because youy did not provide both a filter and a template to use.