


Overview
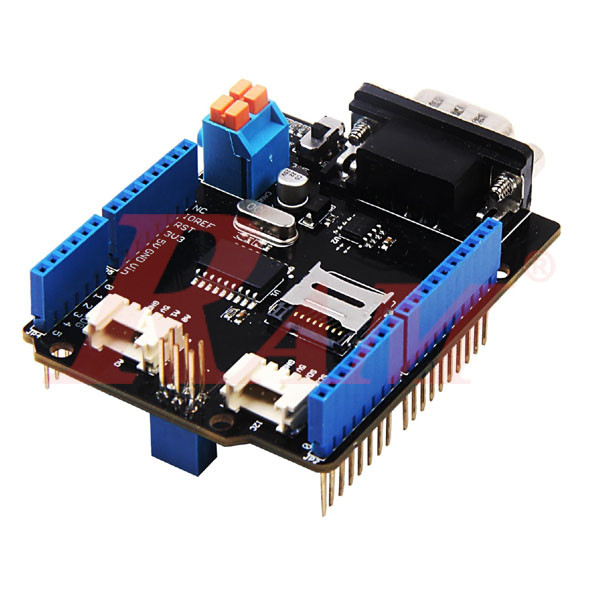
The CAN-BUS Shield V2.0 allows Arduino-compatible boards to communicate over a CAN network. It is based on the MCP2515 CAN controller and MCP2551 transceiver. The shield supports CAN protocol version 2.0B with data rates up to 1 Mbps and includes a DB9 connector that can be configured for either OBD-II or standard CAN applications. Ideal for automotive diagnostics, industrial automation, and embedded systems.
Key Features
- Supports CAN protocol version 2.0B (up to 1 Mbps)
- Dual-function DB9 connector (OBD-II or standard CAN via jumper)
- Uses SPI interface (up to 10 MHz)
- Supports standard (11-bit) and extended (29-bit) CAN frames
- Two receive buffers with message prioritization
- Onboard micro-SD card slot (selectable CS pin: D4 or D5)
- Selectable SPI CS and INT pins for flexible MCU compatibility
- Two Grove connectors (I2C and UART)
- LED indicators for Power, TX, RX, and Interrupt
- Screw terminal block for CAN_H and CAN_L connections
- Cuttable termination pad (P1) for proper network termination
Technical Specifications
- Controller: MCP2515 (via SPI)
- Transceiver: MCP2551
- CAN Speed: Up to 1 Mbps
- SPI Speed: Up to 10 MHz
- DB9 Connector: Configurable for OBD-II or standard CAN
- Micro-SD Slot: Yes (with CS pin jumper)
- CS Pin: Default D9, selectable to D10
- INT Pin: Default D2, selectable to D3
- Grove Ports: I2C and UART
- LEDs: Power, TX, RX, INT
- Termination Pad: P1 (cuttable)
- Dimensions: Approximately 68 mm × 53 mm
- Operating Voltage: 5V
- Weight: Approx. 50 grams
- Compatible Boards: Arduino Uno, Mega, Leonardo, etc.
Applications
- OBD-II vehicle diagnostics
- Automotive CAN networks
- Industrial automation
- CAN-based robotics
- Embedded CAN data logging and monitoring systems
Download:
Your Dynamic Snippet will be displayed here...
This message is displayed because youy did not provide both a filter and a template to use.